1 雙模控制系統結構與工作原理
雙模控制系統結構框圖如圖 1 所示, 它由預測
器、開關控制器、模糊控制器以及控制對象組成的直接數字反饋控制系統
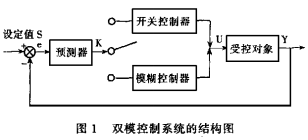
工作原理 :當控制開始時, 系統偏差 e =S -Y 較大, 當偏差的**值 e 大于雙模控制的轉換邊界(Em)時,系統的控制量取正的**大輸出(+Um)或負的**大輸出(-Um), 實行非線性開關控制 ;當偏差逐漸減少 , e 小于預定的轉換邊界值(Em)時 ,便進行程序切換, 實行預測模糊控制。這樣既能加快過渡過程,又能保證系統超調小, 甚**無超調 , 從而取得良好的調節品質。
2 預測器控制算法
傳統的預測部分都是利用**小二乘法進行遞推
而獲得**新的在線預報模型 ,但是這種方法的計算量太大,影響系統的快速性。對比較簡易的系統來說, 利用一種簡易新型的預測算法
[ 2] 更有效 ,這種算法也是基于對象的歷史數據, 根據運動學原理和**小二乘法機理 ,把二者優越性結合起來 ,使系統控制計算簡單 ,為單片機模糊實時控制系統開辟了新的方向。下面是兩種算法的表達式 :
根據運動學原理 , 對曲線的速度(v)和加速度(a)進行分析,可以從現在時刻以前幾拍的歷史數據中預測下一點的值 ,其表達式為:
y v -a(t)=1 .75y(t-1)-0 .25y(t-2)-0 .75y(t
|
-3)+0 .25y(t-4) |
(1) |
|
若采用**小二乘法進行預測 ,則有 : |
|
|
y σ(t)=2 .25y(t-1)-0 .75y(t-2)-1 .25y(t - |
|
3)+0 .75y(t-4) |
(2) |
式(1)和式(2)各有優點, 前者有較快的響應速度,對觀測量的變化較為敏感 ;而后者穩定性較好,抗干擾能力強。引入加權因子則可綜合兩者的優勢。
y (t)=wy v -a(t)+(1 -w)yσ(t) (3)
本系統中 ,由 ω=0 .5,則 y (t)=2y(t-1)-0 .5y(t-2)-y(t -3)+0 .5y
(t-4)
3 模糊控制器算法
本系統采用帶修正因子的 Fuzzy 控制器, 其結構圖如圖 2 所示。
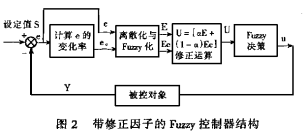
Fuzzy 控制器輸入為偏差e 和偏差變化率 ec ,輸出為控制變量u 。論域E 、Ec 和U 均分成七檔 ,即正大(PL)、正中(PM)、正小(PS)、(零)、負小(NS)、負中(NM)、負大(NL), 相應用 +3 、+2 、+1 、0 、-1 、-
2 、-3 來表述。帶修正因子的控制算法為:
其中 ,取α= e / em ax ,em ax為 e 的**大值,則 α∈[ 0 ,
1] 。
因此 ,當 e 大時 α大;當 e 小時 α小, 這種加權的程度恰好反映了操作者進行控制活動時的思維特點 ,也避免了控制規則定義中的空檔或跳變現象。
另外 , 為了避免在開關控制器和模糊控制器進行切換的臨界處出現抖動 , 采用了類似“磁滯線”的切換方法 ,即上升階段當 e <e2 , 采用開關控制算法,否則采用模糊控制算法;在下降階段當 e >e 1 , 采用開關控制算法 ,否則采用模糊控制算法。
4 高速
冷凍離心機硬件結構
高速
冷凍離心機主要是從液體混合物中提煉出需要的成分,根據每種物質的密度不同 ,經過高速旋轉,密度大的液體沉在底層 , 密度小的液體浮在上面,這樣就將液體分層, 提煉出我們所需要的純凈物。它應用于醫藥、化工等許多*域。其硬件結構圖如圖 3 所示。
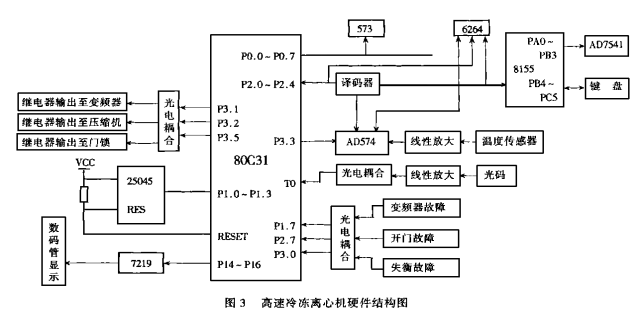
系統輸入有兩個 :轉速輸入和溫度輸入。轉速由光碼測量 ,每轉輸出六個脈沖 ,其控制采用上述算法。溫度由AD590 測量,當溫度高于設定值 2 ℃時 , 壓縮機啟動;當溫度低于設定值 2 ℃時, 壓縮機停止。另外,系統有時間控制 ,當電機轉速超過 500 轉時開始計時 ,當計時達到設定時間時停機。系統輸出有繼電器輸出的變頻器啟/停、壓縮機啟停、門鎖控制和D/A 輸出的0 ~ 5V 或0 ~ 10V 的電壓控制轉速。故障檢測有變頻器故障、開門故障、失衡故障、超溫故障、超速故障。系統設有看門狗。
5 高速
冷凍離心機軟件流程
高速冷凍
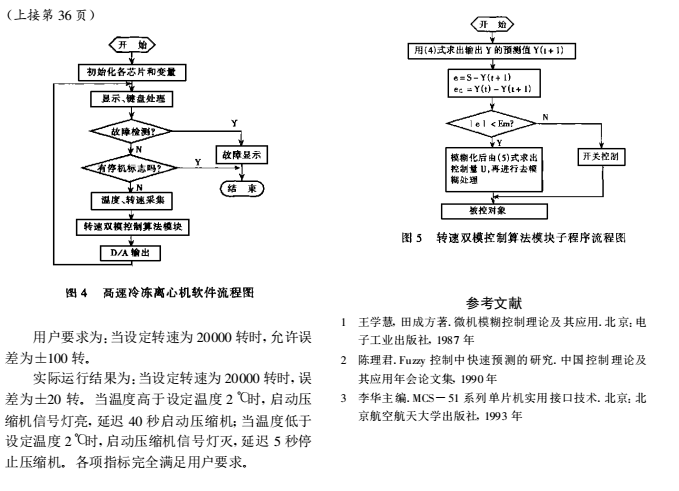
離心機軟件流程圖如圖 4 所示。
轉速雙模控制算法模塊子程序流程圖如圖 5 所
示。
在樣機調試中已確定了七種轉子型號的控制子程序 ,適合于幾千轉**三萬轉的轉子。在應用中 ,用戶只需通過鍵盤輸入用戶所使用的轉子型號。
6 系統運行結果出控制失靈及系統機械故障等應能及時檢測并報警 ,關閉所有控制對象 ,使系統損失減到**小。同時在檢測到一些對生產不造成影響的故障如鍵壞、顯示不正常等 ,則應報警提示操作員,但不停止生產。
(4) 液壓機實現壓力平衡的方式采用的是加壓與泄壓并存進行的。當壓差(需要壓力 -實際壓力)較大時采用強加壓、泄壓為零輸出方式 ;壓差較小時采用弱加壓、泄壓為零輸出方式 ;負壓(需要壓力 -實際壓力為負)時則要用加壓為零、泄壓輸出方式。這個過程理論上較簡單 ,但實際控制過程中由于系統響應滯后現象產生 , 其算法應在現場實際調試中加以調整,以求得**為滿意的控制結果。
3 調試中出現的問題及解決方法
(1) 由于該生產車間的旁邊有一工頻淬火爐及一電焊車間,工業干擾較嚴重 ,對系統正常工作帶來很大影響 ,經常使程序出現“跑飛”現象。為此,我們采取了一些抗干擾措施。其中包括 :
a .軟件抗干擾措施 ;
b .硬件上除了采用自復位措施外 ,又加強了屏蔽隔離措施;
c .采用獨立電源(和干擾源分相)或加裝 UPS 電源 ;
d .繼電器線圈上加 RC 吸收電路。
有了這些措施后,系統即正常工作 ,再未出來過死機現象。
(2) 采樣信號不穩 ,影響了控制的可靠性。由于干擾嚴重,影響到輸入級信號的穩定 ,導致采樣信號出現虛假現象, 引起了誤動作。我們根據現場中出現的現象進行分析 ,**后在前級加上硬件濾波電路解決了這一問題。
4 結束語
本系統是以 AT89C51 CPU 為主控制器的監控系統 ,實現了氧化鋅片生產的自動控制。該系統經調試后用于生產 , 使產品合格率提高到了 95 %以上, 大大提高了經濟效益。經使用兩年來,系統穩定可靠 ,從未發生故障。